自适应巡航是什么意思,开车解放双脚的利器
点击0|回复0
发表于 2018-10-09 09:43
很多人开车的时候都会遇上一个问题,那就是在遇上堵车的时候,需要全神贯注得盯着车辆,不断的停车、启动,非常的烦人,很容易造成驾驶疲劳,而在高速上进行驾驶的时候,可能就会需要注意其他的车辆,如果你的车辆上安装了自适应巡航系统的话,这些问题可能就不会那么复杂了,因为这个系统能够根据车辆的附近情况,自动的调节汽车车速,以确保汽车的正常运行,能够很好的保证汽车的平稳驾驶,自适应巡航系统在其发展的过程中,一直在改变着,其改变的方向可能有些人能够猜到,估计就是智能系统的形式,或者说是无人驾驶,不过本文主要给大家介绍的还是自适应巡航系统的一些信息。
自适应巡航
一、自适应巡航是什么意思

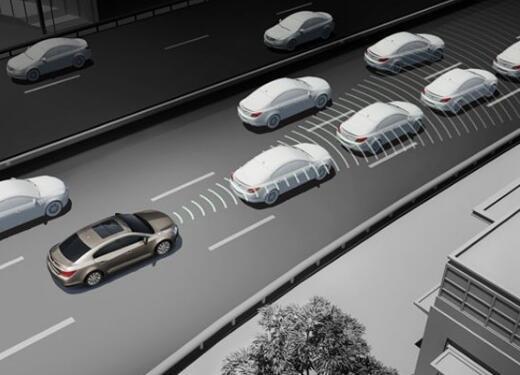
自适应巡航(Adaptive Cruise Control)是基于定速巡航对于速度的控制,进一步实现对于距离的把握。它集成了车辆摄像头、雷达和超声波系统,通过ACC控制单元与ABS系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离,能够让汽车比司机的回应更迅速。
简单地说定速巡航只做一件事,那就是达到驾驶员预设的时速要求,而自适应巡航除了达到预设时速外,它还肩负着保持预设跟车距离以及随着车距变化自动加速与减速的任务。从某种意义上来说,如果想要实现汽车智能化自动驾驶,这个系统是必不可少的。
汽车自适应巡航控制(adaptive cruise control, ACC)系统是定速巡航控制(cruise control, CC)系统的提升和扩展,除了定速巡航功能外,还获取前方道路信息,并基于与前车的间距和相对速度等信息,控制本车的节气门开度和制动力矩,调节其纵向速度,使其相对前车以合适的安全间距行驶。采用该系统对于提高汽车行驶的安全性、舒适性和节能性,降低驾驶员的工作负担,提高道路的通行能力具有重要意义。
二、自适应巡航理论

自适应巡航信号控制单元是自适应巡航系统的“大脑”,在自适应巡航系统的信号控制单元中,如何构造自适应巡航系统的控制算法,调节节气门开度角和刹车压力等,使车辆按照间距在自适应巡航系统的下层控制中,主要实现执行器的切换逻辑以及各执行机构的控制算法。针对不同执行器的切换逻辑设计,目前,研究主要采用阈值切换原则:当上层控制算法计算的期望加速度大于给定阈值时,自适应巡航采用油门驱动控制,反之采用刹车制动控制。
三、自适应巡航原理
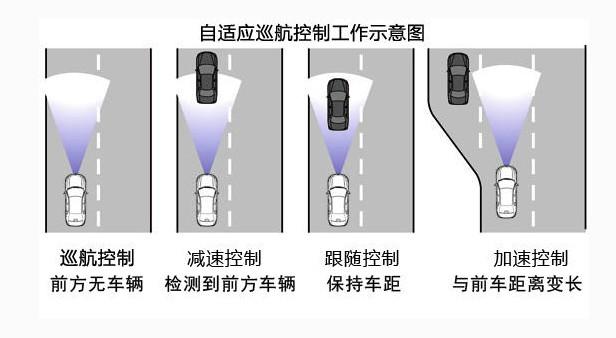
在自适应巡航系统的实际应用中,主要包括定速巡航、匀速跟车、换道插入/驶离、紧急刹车这五种典型的交通场景。
1、当无车辆时,主车将处于普通的巡航状态,自适应巡航系统按照驾驶员设定的车速对车辆进行匀速控制。
2、当自适应巡航系统将主车减速至理想的目标值后采用跟随控制,与目标车辆以相同的速度行驶。
3、当驾驶员参与车辆驾驶后自适应巡航系统将自动退出对车辆的控制。
4、当主车前方有目标车辆,且目标车辆的行驶速度小于主车的速度时,自适应巡航系统将控制主车进行减速,确保两车间的距离为设定的安全距离。
5、当前方的目标车辆移车道行驶,或主车移车道行驶使得主车前方又无车辆时,自适应巡航系统将对主车进行加速控制,使主车恢复至设定的行驶速度。在恢复行驶速度后,自适应巡航系统又转入对主车匀速控制。
四、自适应巡航结构

自适应巡航系统主要包括控制模块、信息收集单元、执行机构、人机交互等零部件组成,ACC功能的实现不是单独依靠雷达,依靠的是对多系统的融合,这也成为重点研究方向。
1、信息收集单元
作为探测周边环境的关键零部件,雷达的相关参数直接影响自适应巡航系统的功能和性能。通过对探测距离、分比率、环境适应度等参数分析,与激光雷达、超声波雷达、红外雷达、摄像头等传感器相比,毫米波雷达具有恶劣环境适应性强、毫秒级响应速度、超远探测距离、低成本等多项优势。目前,沃尔沃XC60、奔驰S、奥迪A6等车型均采用毫米波雷达传感器。随着技术的发展,多传感器技术融合成为未来研究的方向。
2、辅助传感器
要实现车辆的纵向控制,单纯依靠雷达对环境的探测是不够的,还需要综合车辆状态和驾驶意图的判定,这就需要车速、车辆状态、方向盘转角及转速、横摆角等多种信号的输入。同时,自适应巡航运行的过程中,如果驾驶员解开安全带,这种情况下,自适应巡航是需要退出车辆的控制,要求驾驶员接管车辆。所以ACC还需要包括驾驶员侧安全带、车门开启、雨刮等信号的输入,实现对自适应巡航功能的限制。
3、执行机构
自适应巡航主要输出制动请求和扭矩请求,执行零部件分别为ESP(Electronic Stability Program)电子稳定程序和发动机ECM电子控制模块。自适应巡航系统对ESP和ECU的相应执行模块的触发门限、响应速度、响应扭矩和减速度误差等参数都有具体的要求。目前,市场上汽车搭载的ESP和ECM多为外资产品,具有一定垄断性。
4、人机交互
人机交互界面主要用于驾驶员对ACC系统的功能选择和参数设定,一般包括OFF/ON、Cancel、Set+、Set-、Resume、Headeway Time几个按键。同时ACC通过图像、声音、震动等方式提示系统状态、故障等信息。控制模块根据不同报警级别,采用不同的报警形式,如果前方情况不紧急,一般采用图像报警;如果前方路况一般紧急,则采用声音报警;如果前方路况非常紧急,则系统不进行报警,直接要求ESP对车辆进行制动。因为既要给驾驶员预留反应时间,也要保证报警的有效,所以报警门限的合理选择也是重点研究的方向。
5、控制模块
自适应巡航系统的计算模块一般集成在雷达本体中,雷达探测到周边环境等信息,决策计算出车辆的控制作用,输出给执行机构。
五、自适应巡航前身
再讲自适应巡航系统前,我们要先了解它的前辈定速巡航系统。定速巡航系统缩写为CCS,又称为定速巡航行驶装置,速度控制系统,自动驾驶系统等。其作用是:按司机要求的速度合开关之后,不用踩油门踏板就自动地保持车速,使车辆以固定的速度行驶。采用了这种装置,当在高速公路上长时间行车后,司机就不用再去控制油门踏板,减轻了疲劳,同时减少了不必要的车速变化,可以节省燃料。
由于汽车技术的发展,越来越多的拉线式节气门控制方式快速的被电子式节气门控制方式多代替。拉线式定速巡航器主要由控制开关、控制组件(巡航电脑)伺服器(机械执行机构)组成。定速巡航系统的工作原理,简单地说就是由巡航控制组件读取车速传感器发来的脉冲信号与设定的速度进行比较,从而发出指令由伺服器机械的来调整节气门开度的增大或减小,以使车辆始终保持所设定的速度。电子式多功能定速巡航系统摒除了拉线式定速巡航器的机械控制部分,完全采用精准电子控制,使控制更精确,避免了机械故障的风险。
六、自适应巡航怎么出现的

定速巡航也有一个明显劣势,就是只能提供相对恒定的驾驶速度,缺乏对环境的应变能力。当车辆在高速公路上还可以应付,但在我们实际的道路中路况都是千变万化的,会遇到种种意外让你不得不取消定速。比如当前面的车辆突然减速、行驶在车辆较多的城市、在地形相对复杂的道路上。在这些时候,定速巡航几乎就失去了作用,导致实际利用率很低,因此自适应巡航系统应运而生。
七、自适应巡航的组成
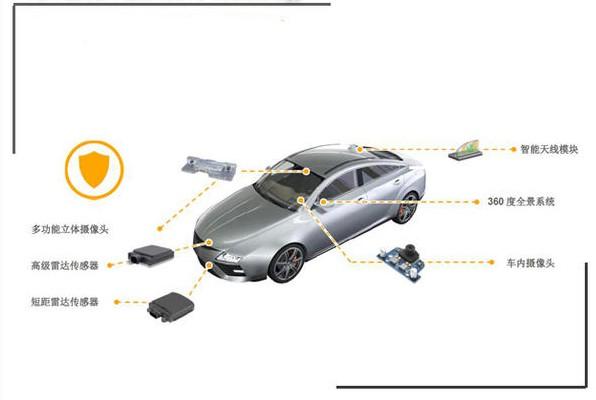
首先是传感器,目前有雷达(长距雷达),超声波测距传感器,红外测距传感器等等。
传感器相当于“眼睛”。对于眼睛来说,关键是要识别在本车道的前车,排除旁边车道车辆的影响。
眼睛接收到信号后,就传递给汽车大脑中的ACC 巡航控制系统,该系统会查询一系列规章制度,以决定汽车该怎么行驶,这些规章制度就是ACC中的控制策略。
安全车距模型(意思就是汽车跟前车保持多少距离合适)是ACC系统控制的主要控制策略之一;他不能过大,否则会导致你后头车辆的抗议;不能过小,否则有追尾风险;安全车距是最小停车距离与当前车速的函数。
PS:安全距离,其实并不是一个固定的长度单位,而是所谓的TTC,time to collsion,即假设保持当前相对速度,两车发生追尾所需要的时间。
在大脑告诉了汽车该怎么做之后,接下来就是执行机构的事了,执行机构相当于汽车的“手脚”。
执行机构包括节气门,制动,档位。通过这些机构的动作,对汽车进行操控。
八、自适应巡航的作用

自适应巡航控制系统是一种智能化的自动控制系统,它是在早已存在的巡航控制技术的基础上发展而来的。在车辆行驶过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,同时轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。
1、自适应巡航作用一
自适应巡航控制系统一般在车速大于25 km/h时才会起作用,而当车速降低到25 km/h以下时,就需要驾驶者进行人工控制。通过系统软件的升级,自适应巡航控制系统可以实现“停车/起步”功能,以应对在城市中行驶时频繁的停车和起步情况。
2、自适应巡航作用二
通过车距传感器的反馈信号,ACC控制单元可以根据靠近车辆物体的移动速度判断道路情况,并控制车辆的行驶状态;通过反馈式加速踏板感知的驾驶者施加在踏板上的力,ACC控制单元可以决定是否执行巡航控制,以减轻驾驶者的疲劳
下一主题:韩系车的优势到底还能支撑多久?

 京公网安备:
京公网安备: